Carrinho com controle remoto
Agora vamos controlar nosso carrinho utilizando o controle remoto.
Primeiro, familiarize-se com o controle remoto.
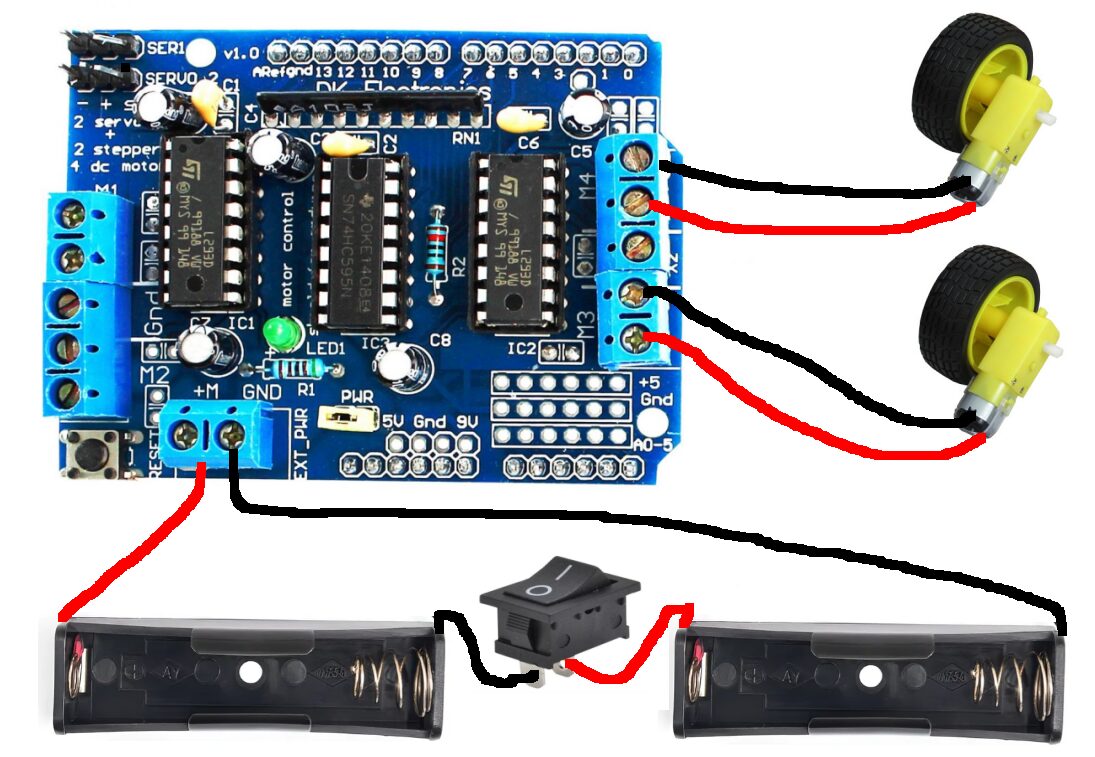
A ligação ficará assim:

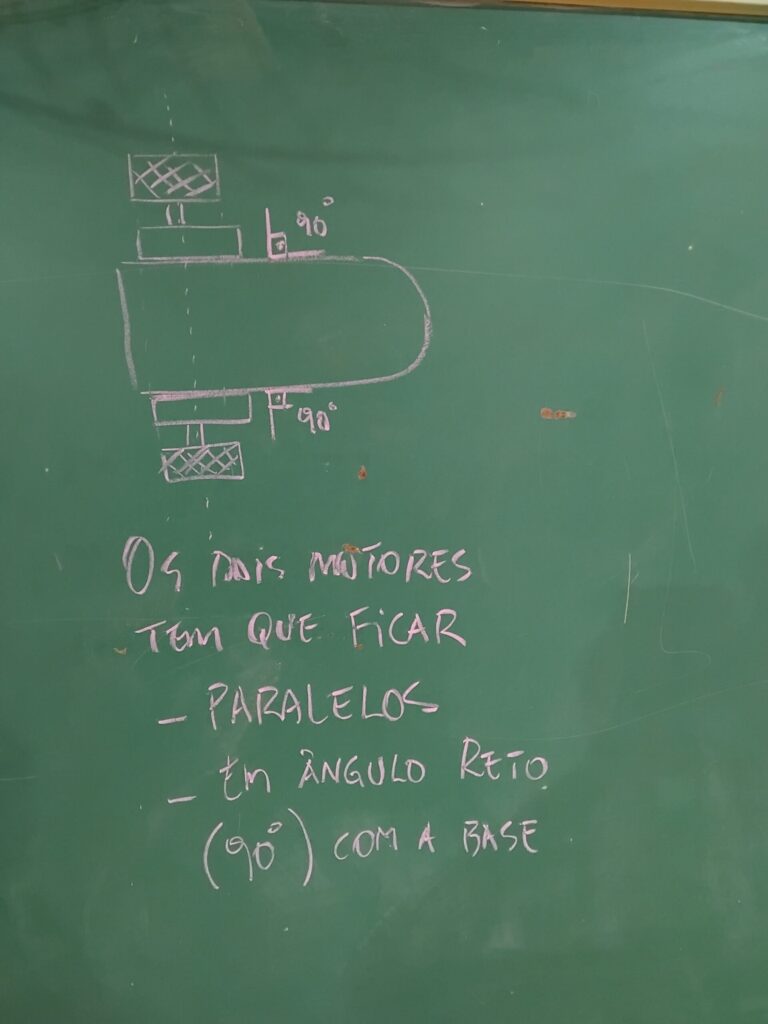
Lembre-se de que já temos os (motores conectados).
{kind=link}
O código pode ser este:
#include <AFMotor.h> //esta é a biblioteca ‘Adafruit Motor Shield library’ que instalamos
#include "IRremote.h" //estes arquivos devem estar na mesma pasta que o '.ino'
#define pinoControle A0 //porta em que foi ligado o sensor IR
IRrecv receptor(pinoControle);
decode_results resultados;
byte tecla;
AF_DCMotor mEsq(3); //AF_DCMotor é o objeto; mEsq o nome da variável; '3' foi a porta escolhida
AF_DCMotor mDir(4); //motor 'mDir' ligado na porta 4
void setup()
{
//note que não usamos o 'pinMode', pois a declaração do objeto 'AF_DCMotor' já faz isso
//idem para o controle
Serial.begin(9600);
receptor.enableIRIn();
//velocidade inicial - vai de 0 até 255
mEsq.setSpeed(150);
mDir.setSpeed(150);
//parar os motores
mEsq.run(RELEASE); //'run' controla o motor e o parâmetro 'RELEASE' desliga o motor
mDir.run(RELEASE);
}
//lembre-se de que os códigos variam de um controle para outro !
void loop() {
if (receptor.decode(&resultados)) {
if(resultados.value != 0xFFFFFFFF){
tecla = resultados.value;
Serial.println(tecla);
}
switch (tecla){
case 199: //lembre-se de que o valor depende de cada controle remoto
Serial.println("OK");
mEsq.run(RELEASE); //'RELEASE' desliga o motor
mDir.run(RELEASE);
break;
case 231:
Serial.println("Tecla Para Cima");
mEsq.run(BACKWARD); //motor no sentido 'para frente'
mDir.run(BACKWARD);
break;
case 181:
Serial.println("Tecla Para Baixo");
mEsq.run(FORWARD); //motor no sentido 'para trás'
mDir.run(FORWARD);
break;
case 239:
Serial.println("Tecla Para Esquerda");
mEsq.run(FORWARD);
mDir.run(RELEASE);
break;
case 165:
Serial.println("Tecla Para Direita");
mEsq.run(BACKWARD);
mDir.run(RELEASE);
break;
}
receptor.resume(); //prepara para o próximo valor
}
}
Baixe o código aqui ( carrinhoControleRemoto ).