RFID
RFID
(se preferir, pegue __aqui__ a versão em PDF; códigos disponíveis __aqui__ )
Identificação por rádio frequência (Radio Frequency IDentification)
Há mais de uma forma de comunicação possível: SPI (Serial Peripheral Interface), I2C (Inter-Integrated Circuit) e por meio de UART (Universal Asynchrounous Receiver/Transmitter).
Tanto o SPI quanto o I2C são síncronos, isto é, dependem de um sinal de sincronismo (clock). A UART pode ser síncrona ou assíncrona; quando atuando em modo síncrono é chamada de USART (Universal Synchronous Asynchronous Receiver Transmitter).
SPI e I2C usam os termos ‘mestre’ e ‘escravo’. Mestre (master) é quem inicia e controla a comunicação, enquanto escravo (slave) é quem responde aos comandos do mestre. Vários dispositivos podem ser conectados utilizando-se esta configuração: até 127 em I2C, usando-se dois fios; e, usando 4 fios, tantos quantos forem possíveis gerar sinais de seleção (SS) com o SPI. Chamamos isto de barramento.
Quando se usa o SPI, a comunicação do master para o slave é identificada como MOSI (Master Output Slave Input – podendo estar marcado também como SDO ou DO ou Dout ou SO), e quando vai do slave para o master como MISO (Master Input Slave Output – podendo estar marcado como SDI ou DI ou SI ou Din). Ainda, são usados os sinais de sincronismo (ou clock, marcado como SCK ou SCLK ou CLK) e o de seleção de dispositivo slave (SS ou slave select, podendo estar marcado como CS ou nSS ou nCS).
Quando se usa o I2C, a comunicação será controlada por meio do endereço (em geral identificado por um número hexadecimal) do dispositivo escravo. O master escreverá no barramento o endereço do dispositivo com o qual ele quer se comunicar e o slave correspondente responderá. Para isso, são usados os sinais de controle, identificados como: SDA (Serial Data), para troca de dados, e SCL (Serial Clock), para sincronismo. O SDA funciona de forma bidirecional: é uma saída do master e entrada para o slave no momento inicial e de envio de comandos, e, depois, funciona como uma entrada do master e saída no slave para envio de dados do slave ao master.
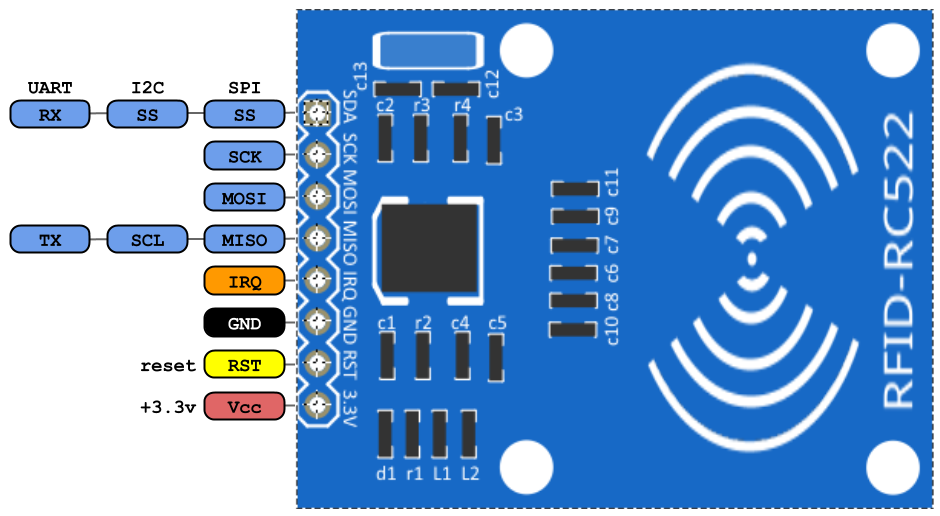
O cartão leitor de ‘tags’ (etiquetas) que iremos utilizar está representado a seguir, com breve explicação do significado de seus pinos de conexão.
|
SDA – Pode ser uma entrada (quando se usa a comunicação SPI), como transmissão de dados seriais quando está sendo usada a comunicação I2C, ou como entrada de dados quando está sendo usada a UART |
 |
|
SCK– Usado para sincronizar os pulsos de clock do barramento SPI |
|
|
MOSI – Master Out/ Slave In para o módulo RC522, quando usando-se o SPI. |
|
|
MISO – / SCL / TX – Master In/ Slave Out para o módulo RC522, quando usando-se o SPI. É usado como sincronismo (relógio, SCL) quando se está usando o I2C, ou como saída de dados quando usando-se UART. |
|
|
IRQ – Este pino gera um sinal (interrupt request) para alertar o controlador (Arduino) quando uma ‘tag’ estiver próxima. |
|
|
GND – Energia, terra, 0V. |
|
|
RST – É o reset, ou reinicialização. Se for colocado em nível baixo (oV, GND) o RC522 fica inativo. |
|
|
VCC – Energia, +3,3 V. ATENÇÃO: é 3,3Volts, não conecte no +5V! |
Para facilitar o controle do cartão, utilizamos de uma biblioteca de códigos. As bibliotecas disponíveis costumam ser voltadas à comunicação SPI, então, usaremos uma destas, por ser mais comum.
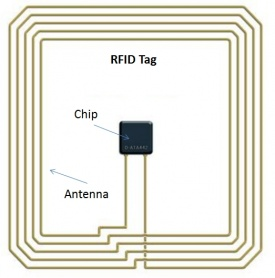
Porém, para que a comunicação funcione, temos mais um elemento: a ‘tag’. Foi usado o nome tag (etiqueta) em função de que uma das aplicações pensada foi justamente a de colocar etiquetas sensíveis a rádio frequência em produtos diversos (embora a tag possa estar presente em cartões e outras apresentações).
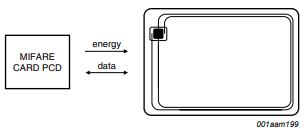
Este tipo de dispositivo faz parte de uma grande ‘família’ conhecida como NFC (Near Field Communication – comunicação por campo próximo; seu celular ou seu cartão de crédito podem ter esta característica), que inclui o subgrupo PICC (Proximity Inductive Coupling Card, cartão de acoplamento indutivo de proximidade)1.
|
A etiqueta possui uma antena. A antena recebe (e é capaz de transmitir) sinais na faixa de rádio frequência (uma frequência comum em tags RFID é a de 13,56MHz). Para funcionar, o chip interno precisa de energia. Ela é obtida por meio do próprio sinal de rádio frequência: ele é retificado e convertido em corrente contínua para fornecer energia ao chip. Assim, o chip não precisa de alimentação externa vinda de pilhas, baterias ou fontes – enquanto estiver próximo a um campo de rádio frequência ele terá energia. Quando recebe energia, o chip gera um sinal de rádio frequência e insere na comunicação um código de identificação (ID), o qual foi previamente cadastrado – podendo, ou não, ser atualizável. |
|
|
A comunicação PCD (Proximity Coupling Device, acoplamento de dispositivo por proximidade) segue padrões internacionais (ex.: ISO/IEC 14443). Algumas tags RFID poderão oferecer a possibilidade de gravação de dados e mesmo de mudança de código de identificação Ver: https://www.mouser.com/datasheet/2/302/MF1S503x-89574.pdf e https://nfc-tools.github.io/resources/standards/iso14443A/ |
|
Para aumentar o alcance (para até uns 10 metros), algumas tags poderão possuir bateria interna.
Vamos testar!
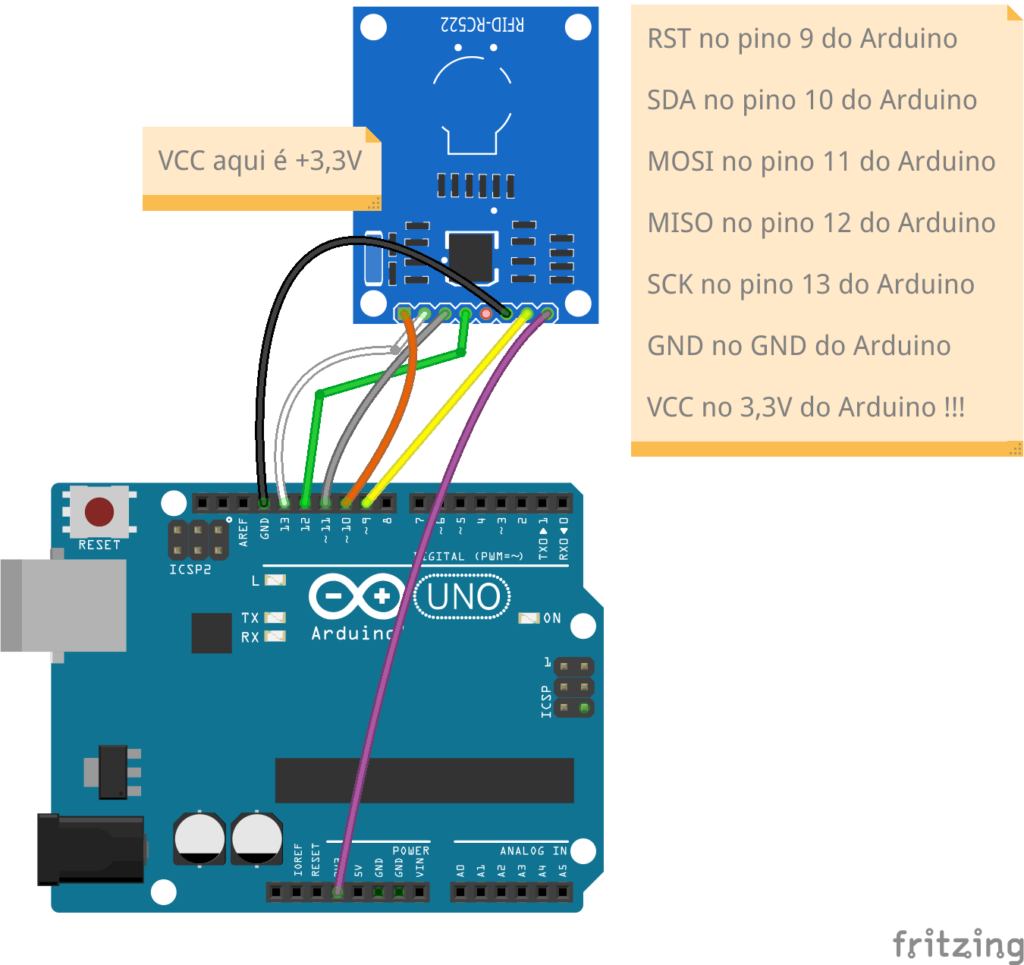
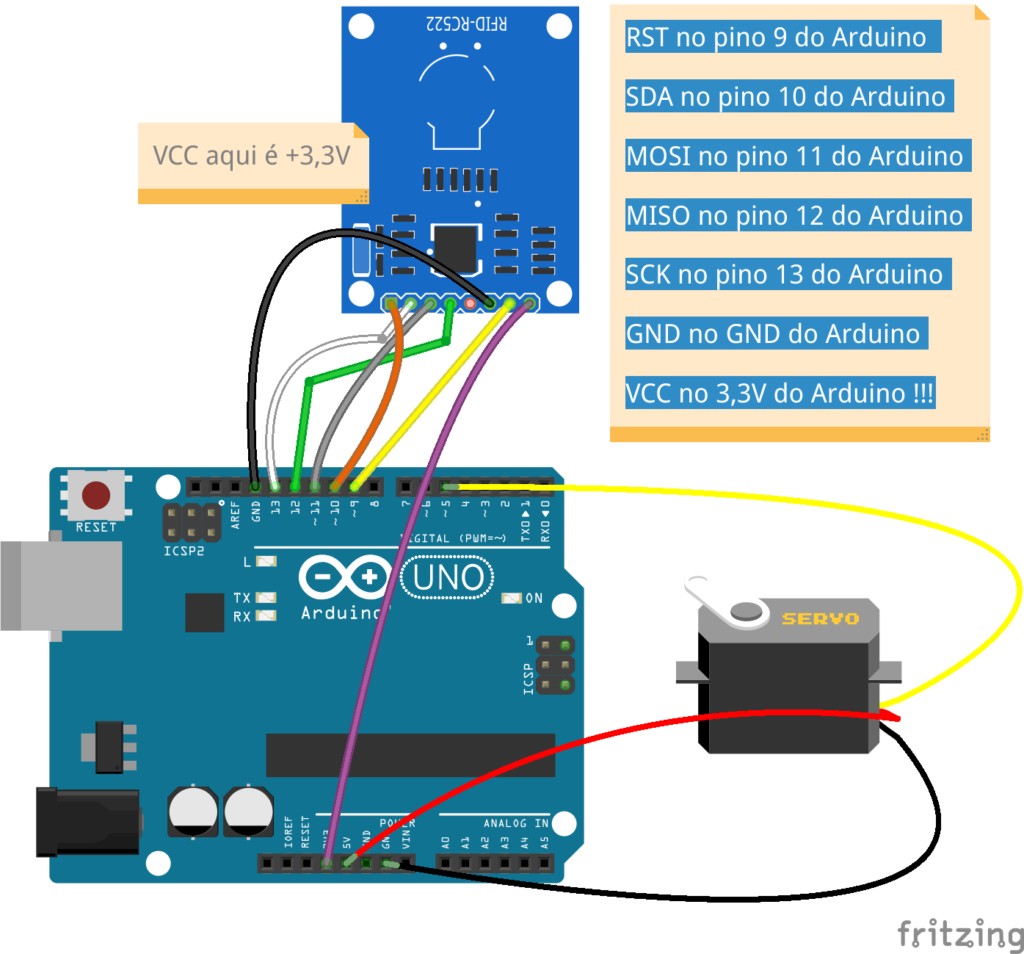
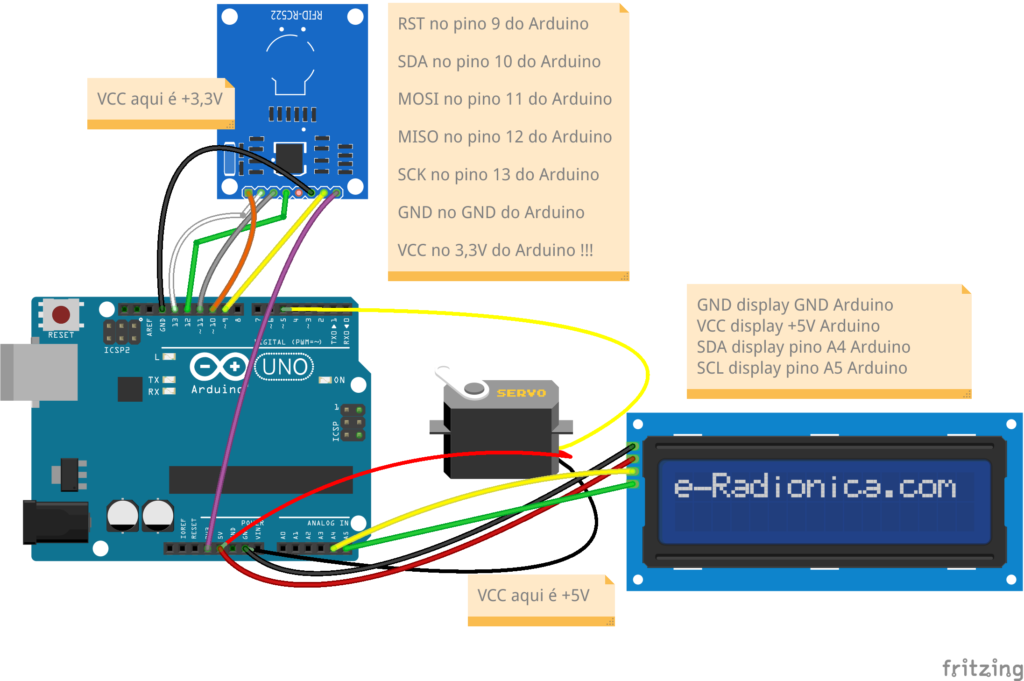
Monte o hardware a seguir:
|
|
Atenção para a ligação do VCC: é em 3,3V, não em 5V! RST no pino 9 do Arduino SDA no pino 10 do Arduino MOSI no pino 11 do Arduino MISO no pino 12 do Arduino SCK no pino 13 do Arduino GND no GND do Arduino VCC no 3,3V do Arduino !!! ( IRQ fica desconectado) |
Depois, na Ide do Arduino adicione a biblioteca (Sketch / Incluir biblioteca) para trabalho com RFID (RC522), ou adicione o arquivo ‘zip’ (Sketch / Incluir biblioteca / Adicionar bioblioteca zip), se você tiver um – em nosso exemplo será usada a ‘RFID MASTER’ disponível em: https://github.com/miguelbalboa/rfid. Em seguida, abra os exemplos (Arquivo/ Exemplos/ MFRC522) e procure por DumpInfo. Compile e envie ao Arduino. Ligue o monitor serial e aproxime uma tag no leitor. Você verá algo assim (os valores mudarão em função de sua tag e de haver, ou não, dados gravados nela):
Card UID: 2A A1 F0 1E
Card SAK: 08
PICC type: MIFARE 1KB
Sector Block 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 AccessBits
15 63 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
62 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
61 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
60 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
14 59 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
58 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
57 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
56 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
13 55 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
54 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
53 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
52 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
12 51 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
50 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
49 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
48 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
11 47 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
46 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
45 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
44 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
10 43 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
42 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
41 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
40 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
9 39 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
38 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
37 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
36 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
8 35 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
34 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
33 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
32 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
7 31 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
30 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
29 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
28 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
6 27 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
26 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
25 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
24 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
5 23 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
22 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
21 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
20 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
4 19 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
18 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
17 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
16 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
3 15 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
14 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
13 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
12 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
2 11 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
10 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
9 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
8 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
1 7 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
6 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
5 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
4 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
0 3 00 00 00 00 00 00 FF 07 80 69 FF FF FF FF FF FF [ 0 0 1 ]
2 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
1 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 [ 0 0 0 ]
0 2A A1 F0 1E 65 08 04 00 62 63 64 65 66 67 68 69 [ 0 0 0 ]
Para o meu caso a identificação da tag é 2A A1 F0 1E (são sempre 4 ou 7 bytes). E, ela possui 1KB, de memória (16 setores x 4 blocos x 16 bytes = 1024 bytes => 1k – mas, há tags com 4k 2). O conteúdo exibido acima corresponde ao conteúdo armazenado na memória da tag. Cada tag é de um tipo.
Tente com as suas tags. Registre as identificações nas ‘tags’, pois vamos usá-las depois.
Agora, abra novamente os exemplos e selecione ReadNUID. Compile, envie ao Arduino e abra o monitor serial. Em síntese, agora você verá somente algumas características da tag – não verá, por exemplo, o conteúdo da memória.
Você verá algo como mostrado a seguir:
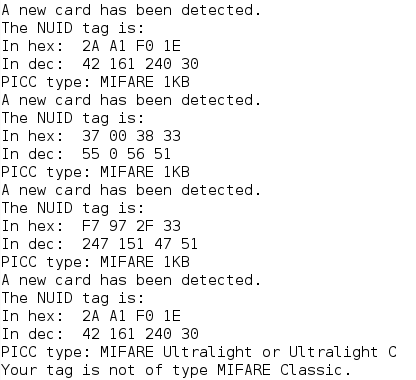
Há vários tipos de tags. A da figura que segue não é no padrão usado pelo exemplo ReadNUID (e foi reportada como ‘Your tag is not of type MIFARE Classic’, na cópia de tela acima). Ela pode ser lida por meio do programa exemplo DumpInfo, anteriormente utilizado:
|
Conteúdo – notar que o ID possui 7 bytes: Card UID: 04 1C 67 F2 DE 64 80 Card SAK: 00 PICC type: MIFARE Ultralight or Ultralight C Page 0 1 2 3 0 04 1C 67 F7 1 F2 DE 64 80 2 C8 48 00 00 3 E1 10 12 00 4 01 03 A0 0C 5 34 03 00 FE 6 00 00 00 00 7 00 00 00 00 8 00 00 00 00 9 00 00 00 00 10 00 00 00 00 11 00 00 00 00 12 00 00 00 00 13 00 00 00 00 14 00 00 00 00 15 00 00 00 00 |
Aspecto da tag:
|

Vamos usar a memória da tag!
Escolha uma tag; abra e execute o exemplo DumpInfo. Guarde uma cópia dos dados exibidos (você pode salvar a tela ou copiá-los e guardar em um editor de textos; a ideia é verificar as diferenças em função dos próximos experimentos).
Depois, nos exemplos, abra o arquivo rfid_write_personal_data. Após compilar e enviar o código ao Arduino, vamos interagir com o monitor serial (deixe a tag sobre o leitor).
Vamos gravar dados na tag. No exemplo de programa em questão, forneça o sobrenome (“Type Family name, ending with #“) e o nome (“Type first name, ending with #“), conforme solicitado.
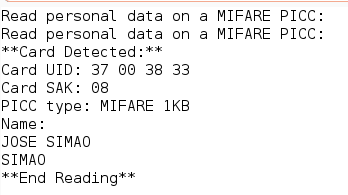
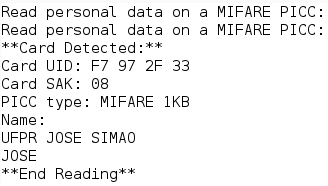
Agora, nos exemplos, abra o arquivo rfid_read_personal_data. Após compilar e enviar o código ao Arduino, vamos interagir com o monitor serial (deixe a tag sobre o leitor) para ler seu conteúdo de memória:
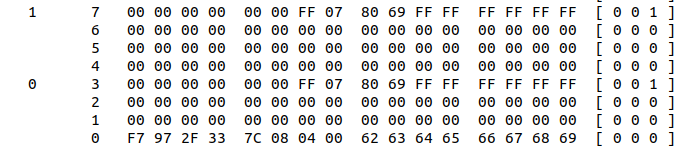
Por fim, volte ao DumpInfo. Leia novamente o conteúdo da tag e compare com aquele que você havia armazenado. Em meu caso, ficou como exibido a seguir (note a diferença):
|
Antes da gravação:
|
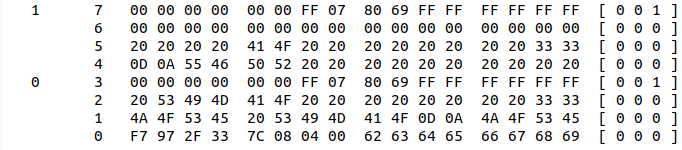
Depois da gravação:
|
O que eu gravei na tag:
Se você quiser, pode utilizar outras formas de comunicação serial (creio ser mais simples usar outra placa, mas a RC522 é mais barata e mais comum) ao invés da SPI:
-
Para trabalhar com I2C a biblioteca deverá será outra. Tente esta – https://github.com/arozcan/MFRC522-I2C-Library. O endereço do dispositivo, para a placa RC522, será 0x3C. Mas, para funcionar você deverá realizar uma pequena modificação na placa: https://europe1.discourse-cdn.com/arduino/original/4X/5/d/b/5db77e1e84b1fb9977963604ad67d22511a6fc59.jpeg
-
Para trabalhar com UART – https://github.com/zodier/MFRC522-UART-Arduino (esta eu não testei)
-
Veja mais informações no fórum do Arduino em https://forum.arduino.cc/t/rc522-rfid-rc522-switching-spi-to-uart-interface-or-i2c-possible/425741/17
Agora, vamos terminar as experiências com RFID controlando um servo motor, em função do valor lido em uma ‘tag’!
Monte o seguinte hardware (somente foi acrescentado um servo, já visto):
|
Foi usado o mesmo hardware utilizado para trabalho com as tags, acrescentando-se somente um servo motor. O servo motor foi ligado de forma a usar o GND, VCC em +5V e o pino de controle do ângulo de rotação, cujo sinal de controle foi conectado no pino digital 5 do Arduino. Cuidado – não ‘misture’ o VCC do RFID (3,3V) com o do servo motor (5V), sob pena de queimar seu Arduino. |
|
Nosso objetivo é: ao ser detectada uma tag de código conhecido, fazer com que o servo motor se movimente 90º (por exemplo, para abrir uma cancela), por alguns segundos (depois ele retorna a 0º e ‘fecha’ a cancela) . Obviamente, ao invés de controlarmos um servo, o comando poderia ser ligar um led, um relé, enviar uma mensagem para um display, emitir um som… a escolha é sua (e, sendo o caso de mudar, avalie as novas conexões e seu registro no código – #define, pinMode – e necessidades de outros código/ outras bibliotecas).
O trabalho com RFID exige uma sequência de comandos para controle da comunicação, motivo pelo qual estamos utilizando uma biblioteca. Como já temos códigos funcionais, para realizar nosso experimento vamos adaptar um dos códigos já utilizados (vamos usar o exemplo ReadNUID.) e incluir nosso acionamento do servo.
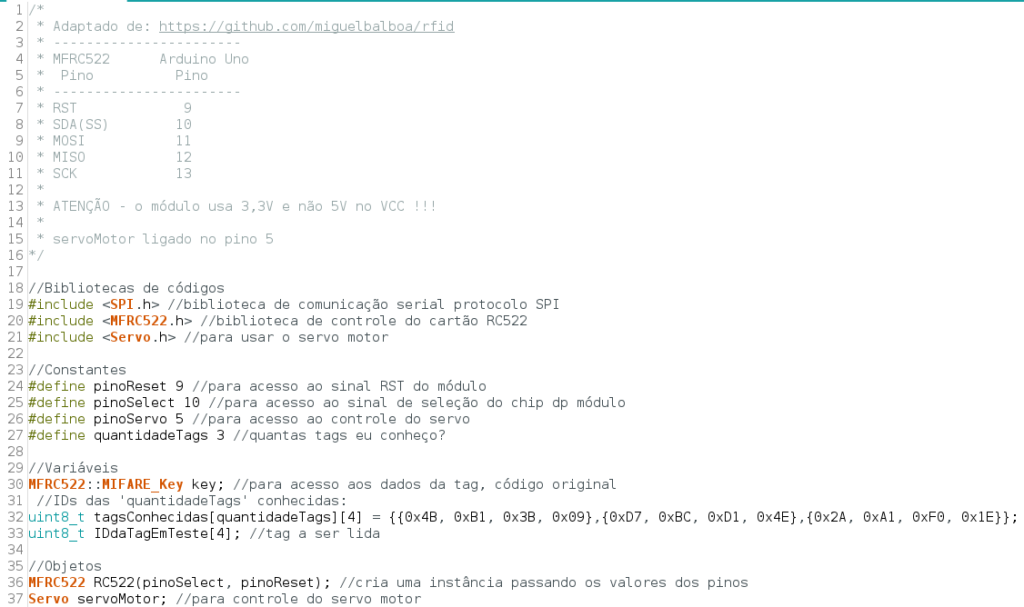
As linhas 19 a 21 definem as bibliotecas de códigos a serem utilizadas: para comunicação serial (SPI), comunicação com o módulo RFID (MFRC522) e com o servo motor (Servo). As linhas 24 a 27 definem algumas constantes para acesso ao módulo (pinos de reset, 9, e seleção do módulo, 10), para cesso ao controle do servo (pino 5) e para a quantidade de tags que iremos armazenar como sendo ‘conhecidas’.
Nas linhas 30, 32 e 33 foram declaradas variáveis para trabalho com informações da tag (‘key’, na linha 30), para armazenar Ids das tags conhecidas (linha 32) e da tag que está sob teste (linha 33). O tipo de vairável é uint8_t, que significa que é uma variável que armazena números inteiros (int), sem sinal (u, de unsigned, sem sinal) de 8 bits de tamanho (ou seja, números ‘pequenos’, de apenas um byte).
A declaração da linha 32, uint8_t tagsConhecidas[quantidadeTags][4], tem a seguinte explicação:
-
trata-se do armazenamento de números inteiros, sem sinal (positivos), de 8 bits (uint8_t);
-
o nome da variável é tagsConhecidas;
-
a variável é matricial, formada por dois vetores: [quantidadeTags] e [4];
-
‘[quantidadeTags]’ é uma constante, declarada na linha 27 (e que tem, neste exemplo, o valor 3); ‘[4]’ é também uma constante (valor 4);
A leitura a ser realizada é: temos um conjunto formado por 3 (‘[quantidadeTags]’) sequências de 4 bytes (‘[4]’). Isto permite que armazenemos o conjunto de IDs das tags de interesse (pois são sequências de 4 bytes, conforme vimos nos exemplos). Neste exemplo, os valores dos Ids são: {0x4B, 0xB1, 0x3B, 0x09},{0xD7, 0xBC, 0xD1, 0x4E} e {0x2A, 0xA1, 0xF0, 0x1E}; note que são três conjuntos, identificados entre ‘{’ e ‘}’ (para formar um conjunto), e, que cada um deles possui uma sequência de 4 bytes, representados em seus valores hexadecimais (o que, na linguagem utilizada, nos obriga a iniciar a declaração com ‘0x’, para que o compilador entenda que é um número hexadecimal).
Nas linhas 36 e 37 são declarados dois objetos (os quais, portanto, possuem várias funções incorporadas por meio das declarações de classes de suas bibliotecas): um para trabalharmos com o módulo RFID (RC522, linha 36, que recebe como parâmetros os números dos pinos de controle necessários, declarados nas constantes das linhas 25 e 24) e outro para trabalharmos com o servo motor (servoMotor, linha 37).
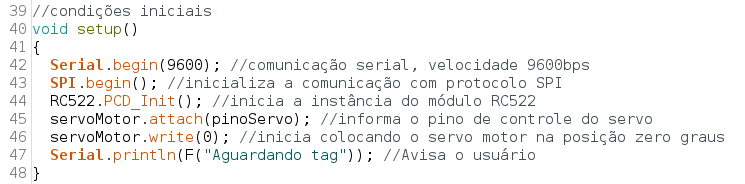
As condições iniciais ao funcionamento do Arduino estão estabelecidas na função ‘void setup()’, entre as linhas 42 e 47. Na linha 42 declaramos que usaremos a interface serial com velocidade de 9600 bits por segundo, bps. A linha 42 inicializa a biblioteca de comunicações SPI e a linha 44 inicializa o módulo RFID. Na linha 45 informamos que conectamos um servo motor, e em qual pino (constante pinoServo, declarada na linha 26) e, na linha 46, passamos ao servo motor um comando para posicioná-lo em 0 graus (isto já foi visto). Finalmente, a linha 47 envia ao monitor serial a informação de que o circuito está pronto.
A seguir, temos mais udas funções. A de laço infinito (‘void loop()’), que controla o funcionamento do Arduino após o setup() ser executado, e uma função escrita para testar a identificação de uma tag, a qual retornará verdadeiro se ela for conhecida e falso se não for.
Vamos estudá-las.
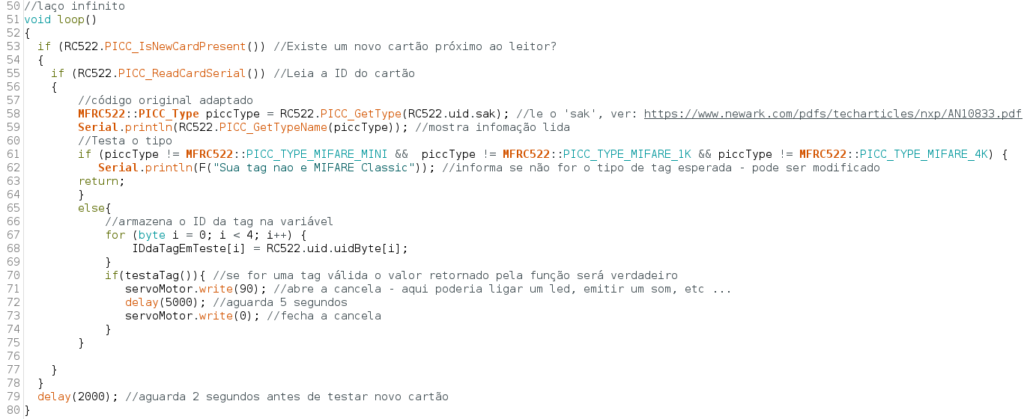
O loop() ocorre entre as linhas 51 e 80. Na linha 53 temos um teste, correspondente à execução do método ‘PICC_IsNewCardPresent()’ no objeto RC522 (que foi declarado na linha 36); este método retorna um valor verdadeiro (true) se houver um novo cartão presente (nas proximidades do leitor), e falso (false) caso não exista/ não seja detectado. SE (if) o teste for verdadeiro (ou seja, se for detectada uma tag), será executado o bloco de instruções presente entre as linhas 54 e 78 (entre o ‘{’ e ‘}’ deste bloco if).
Se o teste for verdadeiro, na linha 55 será executado outro teste, agora quanto ao ao valor de retorno proporcionado pelo método ‘PICC_ReadCardSerial()’: foi possível ler? Caso tenha sido possível a leitura de informações da tag, será executado o bloco de instruções presente entre as linhas 56 e 77. Na linha 58 é declarada a variável ‘piccType’, a qual recebe o valor retornado pelo método ‘PICC_GetType(RC522.uid.sak)’, que informa o valor ‘sak’3 da tag. Este valor será testado na linha 61: caso não seja do tipo esperado o usuário será informado (linha 62) e o bloco termina (linha 63). Senão (else), caso o tipo seja conhecido, será executado o comando for, linhas 67 e 68, o qual irá copiar o valor da ID da tag que está sendo lida, do byte 0 até o byte 3, para a variável IDdaTagEmTeste, que foi definida na linha 33 (novamente, a declaração ‘uint8_t IDdaTagEmTeste[4];’ é para um conjunto, neste caso de 4 bytes – ou seja, podemos armazenar o ID de uma tag de 4 bytes).
=> Em resumo: testamos se há um cartão presente e, se houver, obtemos seu tipo; se o tipo for válido, lemos a ID e armazenamos.
Na linha 70 o comando SE (if) testa o valor retornado pela função testaTag(), que será vista na sequência. Caso o valor de retorno seja verdadeiro (true), colocamos o servo em posição 90º (linha 71, servoMotor.write(90)), esperamos 5 segundos (linha 72, delay(5000)) e, finalmente, colocamos o servo em posição 0º (linha 73, servoMotor.write(0)).
Na linha 79 aguardamos 2 segundos (delay(2000)) antes de testar de novo, o que é realizado somente para não ficar testando continuamente (sendo o caso, pode ser excluída esta espera, ou modificada).
=> Em resumo: se a tag for conhecida, acionamos o servo motor para abrir a cancela, aguardamos 5 segundos e acionamos o servo motor para fechar a cancela.
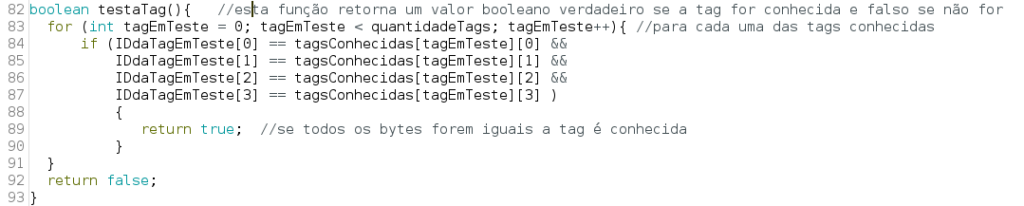
A função testaTag() está declarada entre as linhas 82 e 93 e deve retornar um valor booleano (boolean): verdadeiro (true) ou falso(false) em função de sua execução. Seu objetivo é verificar se o cartão que está sendo testado tem uma ID que faz parte do conjunto de cartões conhecidos (declarado na linha 32).
A declaração da linha 83 (for (int tagEmTeste = 0; tagEmTeste < quantidadeTags; tagEmTeste++)) permitirá que testemos da primeira (0) até a última (quantidadeTags, constante declarada na linha 27) tag conhecida, avançando de uma em uma (++). O teste ocorre entre as linhas 84 e 87, por meio do comando if.
SE o teste realizado pela comparação do ID da tag que está sendo testada (IddaTagEmTeste), em todos os seus bytes (do [0] ao [3]), for igual (==) a um dos IDs (em todos os seus bytes) do conjunto tagsConhecidas, a função retornará verdadeiro (true). Ao retornar, o teste acaba (mesmo que existam outros IDs a testar).
Caso o laço for seja executado para todas as tagsConhecidas e não corra o retorno (ou seja, nenhum teste foi válido), a função retorna falso (return false, linha 92), indicando que a tag em teste não faz parte do conjunto de tags conhecidas pelo programa.
=> Em resumo: testamos o ID da tag que foi aproximada no módulo e, se ele for conhecido retornamos um valor verdadeiro para o teste, e, caso contrário, retornamos um valor falso.
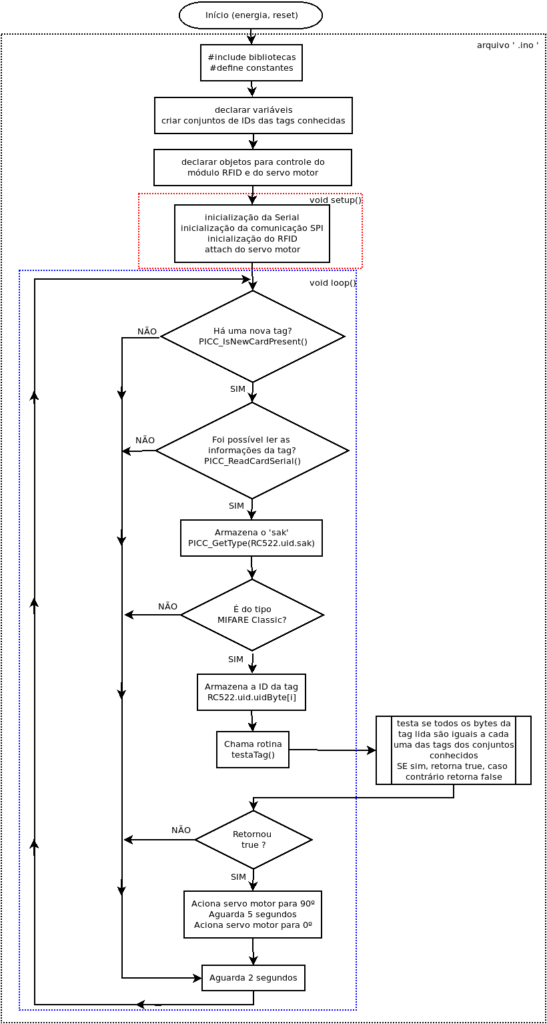
A seguir temos um fluxograma (um tipo de diagrama usado para representar algoritmos) que representa o que foi exposto para o funcionamento de nosso programa leitor de tags para acionamento de um servo motor que controla uma cancela.
Dois grupos de tags.
Agora temos um desafio: queremos ter dois grupos de tags, um dos quais aciona um servo motor e o outro que aciona um segundo servo motor. Podemos ter tags que fazem parte dos dois grupos. E, os grupos não precisam ter a mesma quantidade de tags. Vamos aproveitar o código existente e duplicar algumas declarações, ajustando seus nomes quando necessário.

![]()
![]()

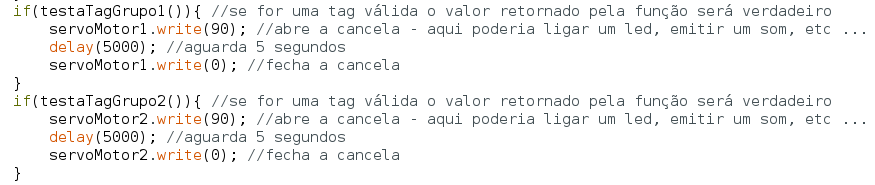
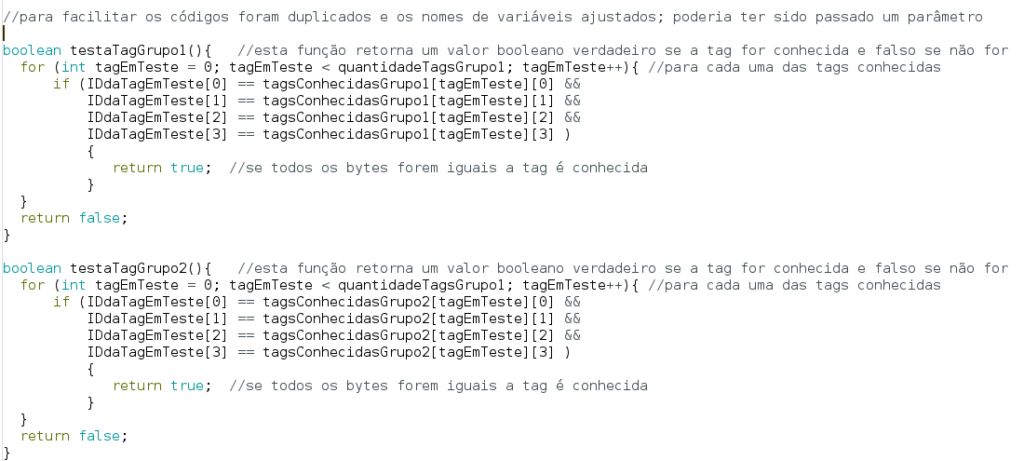
Note que os códigos foram simplesmente duplicados, para agilidade da programação. Poderiam ter sido escritas funções que recebessem parâmetros (como, por exemplo, qual conjunto testar).
Teste o código e verifique a necessidade de, eventualmente, um terceiro ou um quarto grupo de tags (por exemplo, um conjunto para os zeladores, outro para técnicos, outro para professores, outro para alunos, outro para visitantes…).
Teste também outras possibilidades de atuação a partir da detecção das tags: ligar um led verde se for conhecida e vermelho se não for; emitir um som para cado caso; enviar uma mensagem ao monitor serial; ligar um display e mostrar mensagens (já vimos como, não esqueçam das conexões elétricas necessárias e da biblioteca), dentre outras possibilidades (incluindo juntar várias ações…).
=> Em resumo: para termos dois conjuntos de tags conhecidas, criamos duas variáveis, uma para cada conjunto; se precisarmos mais, criamos mais variáveis, sempre na forma
uint8_t nome_do_conjunto[quantidade necessária][4] = {{0x.., 0x.., 0x.., 0x..},{…}};.
Acrescentando um display LCD
Ao invés da interface serial, podemos usar um display LCD para informações ao usuário:
Devem incluídas as bibliotecas:
![]()
Declarado o objeto do display:
![]()
Inicializado o display no setup():
![]()
E, depois, utilizado:

Boas práticas.
1Ver: http://www.nfc-research.at/index.php@id=40.html
2Veja: https://nfc-tools.github.io/resources/standards/iso14443A/
3Ver: https://www.newark.com/pdfs/techarticles/nxp/AN10833.pdf